1、设置sources.list
|
1 2 |
sudo sh <span class="token operator">-</span>c <span class="token string">'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'</span> |
2、设置key(公钥已更新)
|
1 2 |
sudo apt<span class="token operator">-</span>key adv <span class="token operator">--</span>keyserver <span class="token string">'hkp://keyserver.ubuntu.com:80'</span> <span class="token operator">--</span>recv<span class="token operator">-</span>key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |

3、更新package
|
1 2 |
sudo apt<span class="token operator">-</span>get update |
4、安装ROS kinetic完整版
|
1 2 |
sudo apt<span class="token operator">-</span>get install ros<span class="token operator">-</span>kinetic<span class="token operator">-</span>desktop<span class="token operator">-</span>full |
5、初始化rosdep
注意:在使用ROS之前需要初始化rosdep
|
1 2 |
sudo rosdep init |
|
1 2 |
rosdep update |
6、配置ROS环境
|
1 2 3 |
echo <span class="token string">"source /opt/ros/kinetic/setup.bash"</span> <span class="token operator">>></span> <span class="token operator">~</span><span class="token operator">/</span><span class="token punctuation">.</span>bashrc source <span class="token operator">~</span><span class="token operator">/</span><span class="token punctuation">.</span>bashrc |
7、安装依赖项
|
1 2 |
sudo apt<span class="token operator">-</span>get install python<span class="token operator">-</span>rosinstall python<span class="token operator">-</span>rosinstall<span class="token operator">-</span>generator python<span class="token operator">-</span>wstool build<span class="token operator">-</span>essential |
8、测试ROS是否安装成功
(1)、CTRL+ALT+T打开终端(Termial),输入以下命令,初始化ROS环境:
|
1 2 |
roscore |
成功打开如下图所示:
上面显示有ROS的版本,还有一些节点、端号等内容。
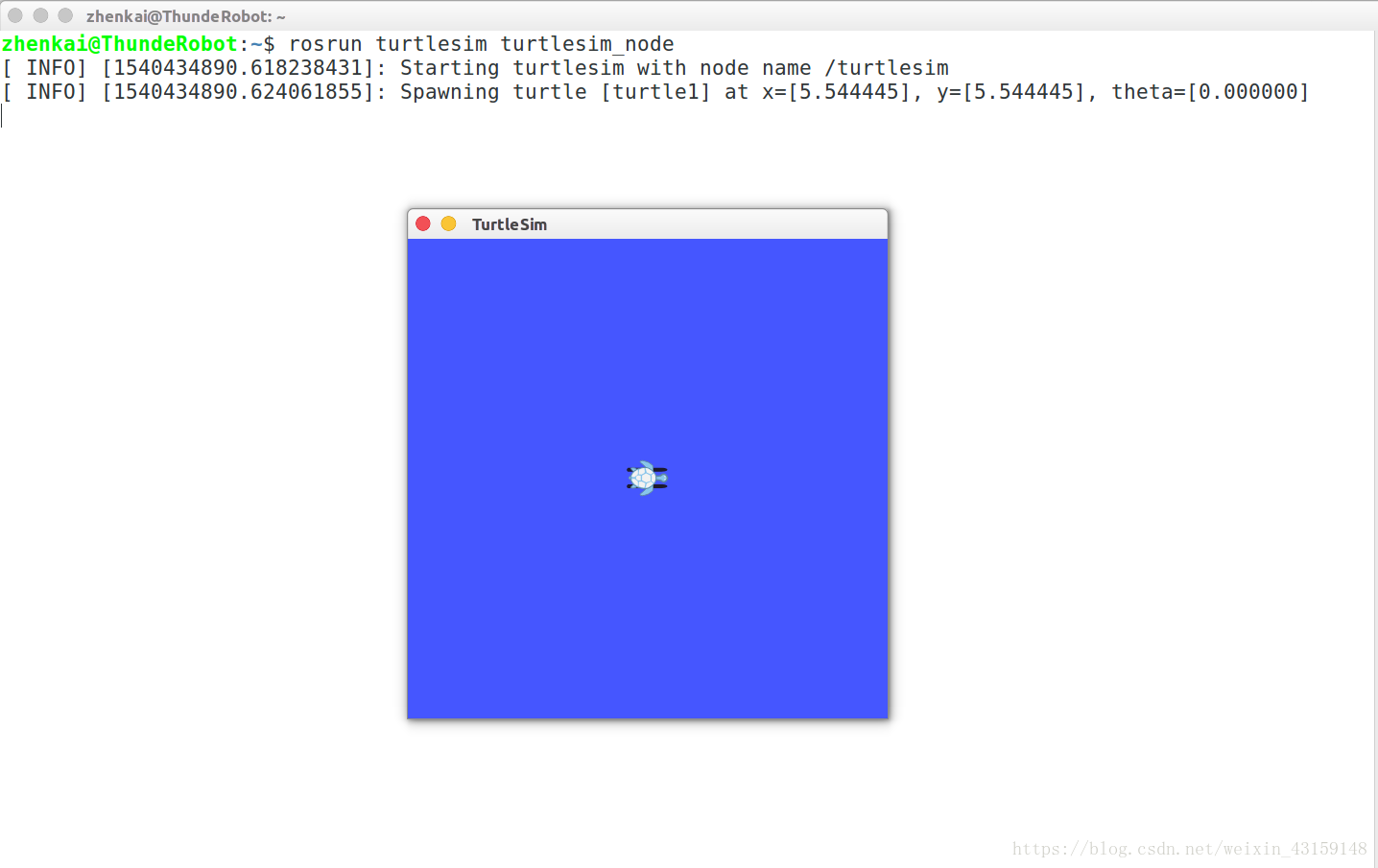
(2)、再 打开一个新的终端(Termial),输入以下命令,弹出一个小乌龟窗口:
|
1 2 |
rosrun turtlesim turtlesim_node |
(3)、出现一个小乌龟的LOGO后,再 打开一个新的终端(Termial),输入以下命令
|
1 2 3 |
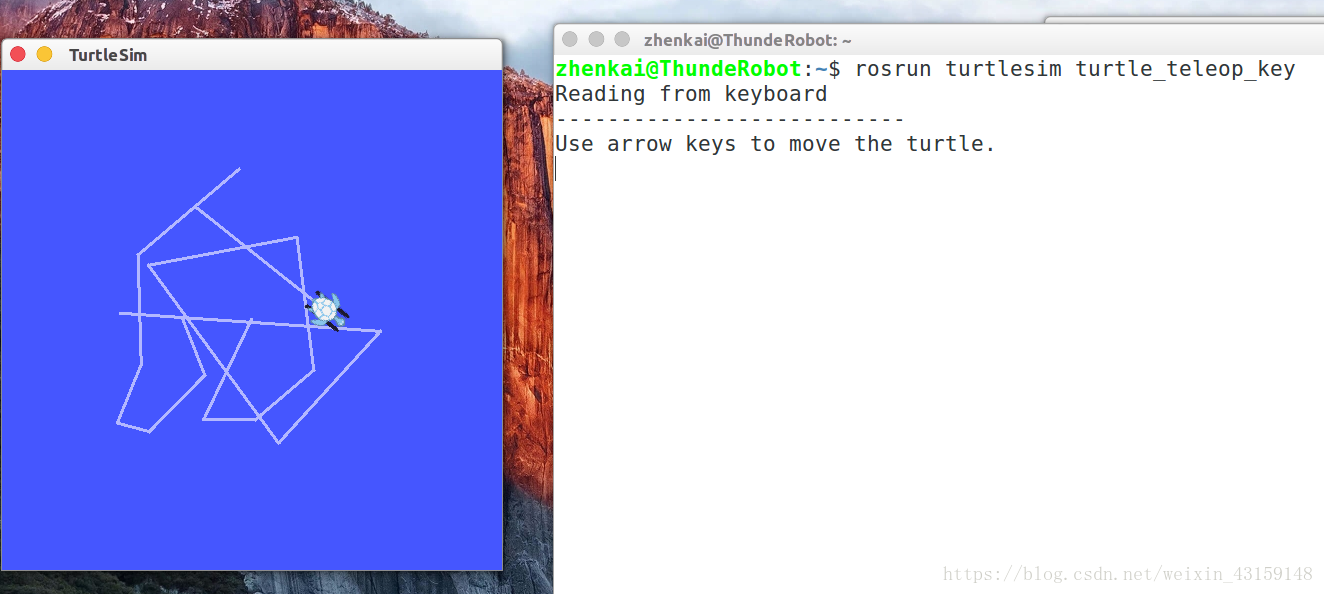
rosrun turtlesim turtle_teleop_key |
然后,通过方向键控制小乌龟的移动:如下图所示
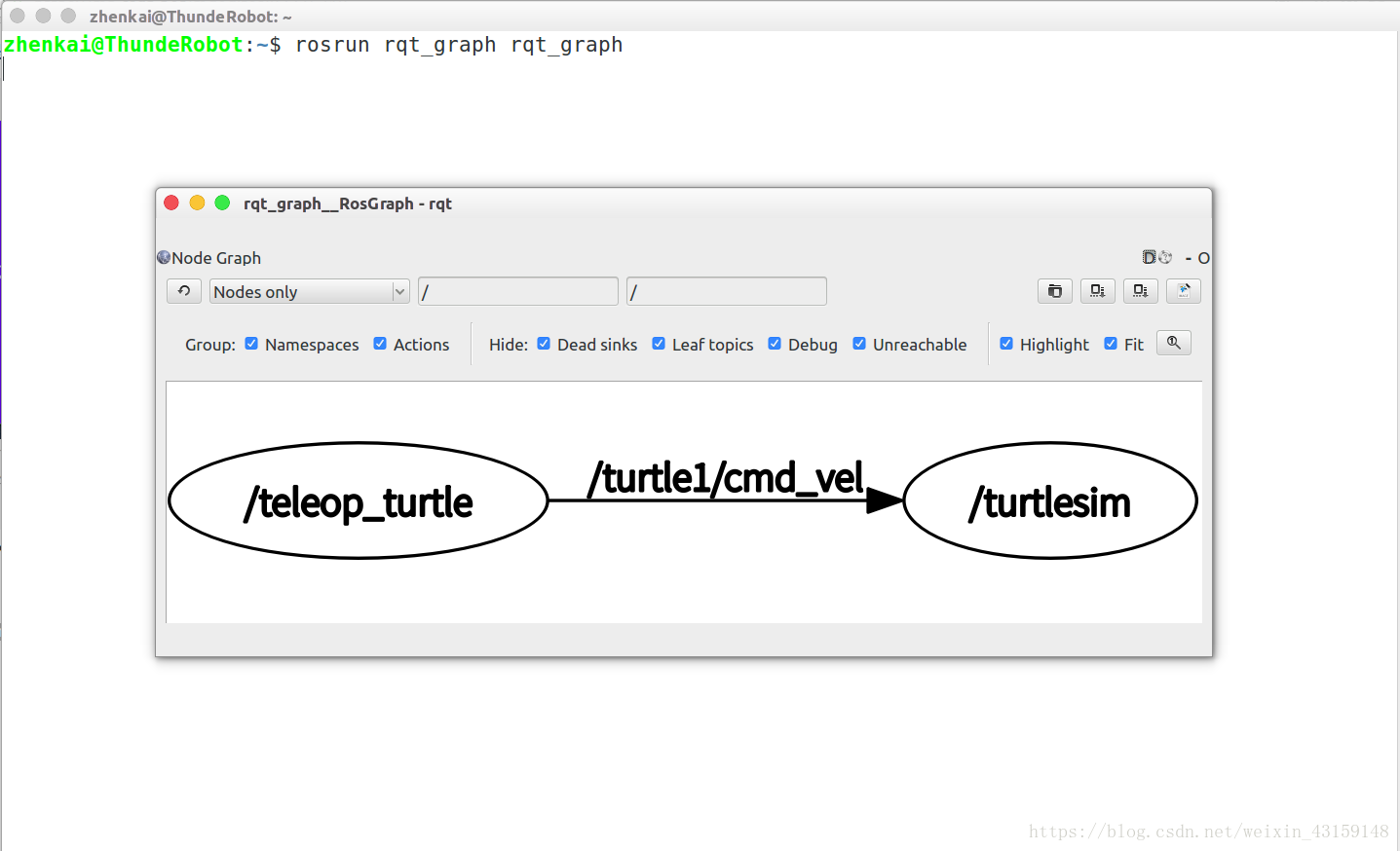
(4)、 打开新的Termial,输入以下命令,可以查看ROS节点信息:
|
1 2 |
rosrun rqt_graph rqt_graph |
如果你能顺利进行到这一步,说明ROS安装成功了。
错误提示:
|
1 2 3 4 5 6 7 8 |
$ rosdep update If you get reading in sources list data from /etc/ros/rosdep/sources.list.d Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml]: <urlopen error timed out> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml) then you can execute the following command: |
解决方法:
|
1 |
sudo gedit /etc/resolv.conf |
改成下面两句:
|
1 2 3 |
nameserver 8.8.8.8 #google域名服务器 nameserver 8.8.4.4 #google域名服务器 |
安装husky
1.How to install husky-simulator in kinetic ?
安装:
sudo apt-get install ros-Kinetic-husky-simulator
报错提示:E: 无法定位软件包 ros-Kinetic-husky-simulator
正确方法:Kinetic改为小写即可!
sudo apt-get install ros-kinetic-husky-simulator
errror:[test_rig3.launch] is neither a launch file in package [svo_ros] nor is [svo_ros] a launch file name The traceback for the exception was written to the log file
只需要回到上层进行source即可
$ cd ~/catkin_ws: $source devel/setup.bash
或者直接
source ~/catkin_ws/devel/setup.bash
环境变量需要重新设置下
3.启动 使用roslaunch启动husky模拟器,启动一个空的世界(任选其一即可,两个区别就是地图不一样):
|
1 2 3 |
roslaunch husky_gazebo husky_empty_world.launch(空地图启动) roslaunch gazebo_ros willowgarage_world.launch(默认地图启动) |
bug描述:
VMware: vmw_ioctl_command error Invalid argument.
解决方式:设置环境变量
|
1 |
export SVGA_VGPU10=0 //临时处理方式,一次性的,下次重启还会同样报错 |
或者
|
1 2 |
echo "export SVGA_VGPU10=0" >> ~/.bashrc //中间俩转义符换成英文大于号>>,此方式为永久方式,会添加一条环境变量,重启后或者运行下面的语句生效 source ~/.bashrc |

Comments | NOTHING